5.4 APLICACIÓN DE LAS TRANSFORMACIONES LINEALES: REFLEXIÓN, DILATACIÓN, CONTRACCIÓN Y ROTACIÓN
Antes de comenzar hay que dejar en
claro lo que es una transformación lineal y es que está es una función. Además,
por ser función tiene dominio y co-dominio, con la particularidad de que éstos
son unos espacios vectoriales.
Ahora bien, para finalizar con este tema de transformaciones lineales, cerramos con su aplicación el cual tiene que ver con cuatro puntos que se presentarán a continuación:
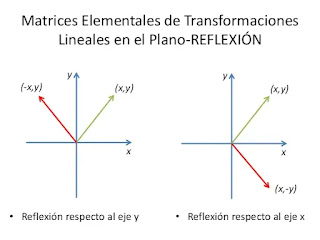
REFLEXIÓN
Cuando un conjunto de puntos
dados es graficado desde el espacio euclidiano de entrada a otro de manera tal
que este es isométrico al espacio euclidiano de entrada, la llamamos reflexión
del conjunto de puntos dados. También se realiza con respecto a la matriz, en
tal situación la matriz de salida es llamada la matriz de reflexión. La reflexión
es realizada siempre con respecto a uno de los ejes, sea el eje x o el eje y.
Esto es como producir la imagen espejo de la matriz actual.
Ahora bien, para finalizar con este tema de transformaciones lineales, cerramos con su aplicación el cual tiene que ver con cuatro puntos que se presentarán a continuación:
EJEMPLO:
Sea V= (2,5) aplique la reflexión con respecto al eje
Y
FÓRMULA

Sustituyendo



EJEMPLO:
Sea V= (3,10) aplique la dilatación igual a c=6 en el
eje x
FÓRMULA

Sustituyendo


CONTRACCIÓN

EJEMPLO:
Sea V= (18,10) aplique la contracción igual a k=2
tanto en x como en y.
FÓRMULA

Sustituyendo



EJEMPLO:
Sea V= (2,4) aplique
la rotación para un
FÓRMULA

Sustituyendo




¿Cuándo hablamos de un espacio euclidiano a que se refiere?
ResponderBorrarSe refiere a un espacio geométrico donde se satisfacen los axiomas de Euclides y que nos sirve para establecer transformaciones lineales.
Borrar¿Por qué en el ejercicio de dilatación los vectores no se ven expandidos de forma que se vea uno sobre otro?
ResponderBorrarEsto es porque no se aplicó la dilatación en ambos ejes, sino solo en uno de ellos, de lo contrario este efecto se hubiera visto
Borrar¿En la contracción el vector que obtengamos siempre quedará a la mitad del vector original?
ResponderBorrarNo necesariamente, esto depende del valor que se le de a c, en este caso se ve así ya que el valor que se le dio fue de 2
Borrar¿Por lo común en la rotación siempre se tiende al final a sacar el ángulo entre dos vectores?
ResponderBorrarPor lo regular sí, esto para comprobar que el ejercicio está realizado de manera correcta
Borrar¿Los vectores en la reflexión siempre nos darán una vista en forma espejo?
ResponderBorrarSí esto siempre será así, ya que el otro vector que nos resulte tenderá siempre a coincidir en el otro cuadrante
Borrar¿Qué diferencia hay entre la contracción y expansión?
ResponderBorrarLa diferencia es que en la contracción el vector original se reduce y en la expansión esté se agranda
Borrar